
火星の孤独な探検家、ついに「完全な目」を手に入れる
火星のジェゼロ・クレーターに降り立ってから5年。
NASAの探査車パーサヴィアランスが、探査ロボットの歴史を塗り替える画期的な進化を遂げました。
これまで地球からの指令と補正に頼っていた「自分の居場所を知る」というプロセスを、探査車自身が単独で行えるようになったのです。
これは単なるソフトウェアのアップデートではありません。
ロボットが真の意味で「自律」し、未知の惑星を自由に歩き回るための決定的な一歩と言えるでしょう。
なぜ「位置の特定」がこれほど難しいのか
私たちは普段、スマートフォンのGPSで簡単に自分の位置を知ることができます。
しかし、GPS衛星が存在しない火星では、そうはいきません。
従来の探査車は、タイヤの回転数から移動距離を推定する「オドメトリ」という手法を使っていました。
ところが、火星の砂地は非常に滑りやすく、タイヤが空転すると計算上の位置と実際の場所にズレ(誤差)が生じてしまいます。
このズレが積み重なると、探査車は自分がどこにいるのか正確に分からなくなり、安全のために停止して地球からの指示を待たなければなりませんでした。
往復で20分以上かかる通信の遅延は、探査のスピードを著しく制限する「見えない鎖」だったのです。
軌道上の地図と「脳内」で照合する技術
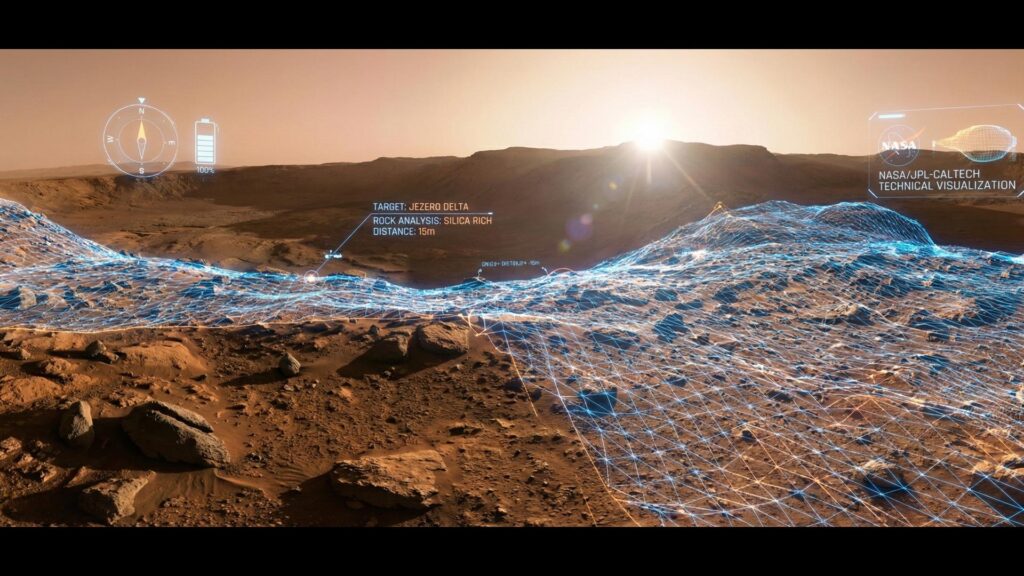
今回パーサヴィアランスに実装されたのは、人間がハイキングで地図を読むのと酷似した能力です。
探査車は自身のナビゲーションカメラで周囲の地形を撮影し、その風景をメモリ内に保存された「軌道周回機が撮影した高解像度マップ」と照合します。
特徴的な岩の配置やクレーターの縁の形状を瞬時にパターンマッチングさせることで、外部からの助けを借りずに「私は今、地図上のこの座標にいる」と正確に特定できるようになったのです。
この技術的ブレイクスルーにより、以下のことが可能になります。
- 長距離の自律走行: 位置の誤差を自分で修正できるため、地球からの指示を待つことなく、より長い距離を迷わずに走行できます。
- 複雑な地形の走破: これまでは避けていた入り組んだ地形でも、自分の位置を見失うことなく安全なルートを判断できます。
- サンプルの高速回収: 火星サンプルリターン計画(MSR)に向けたサンプルチューブの受け渡し場所への移動が、劇的にスムーズになります。
将来の有人探査への布石
この「自己位置推定技術」の確立は、将来の有人火星探査にとっても極めて重要な意味を持ちます。
宇宙飛行士が火星に降り立った際、彼らをサポートする物資運搬ローバーや建設ロボットが、人の手を煩わせることなく正確に目的地へ移動できるようになるからです。
パーサヴィアランスは今、単に岩石を調べているだけでなく、未来の火星基地建設のための基礎技術を実証しているとも言えるでしょう。
まとめ
パーサヴィアランスが獲得した「自律的な位置特定能力」は、いわゆる自動運転ですよね。
火星でもAI が活躍する時代になりそうですね。
参照リンク:
https://www.jpl.nasa.gov/news/nasas-perseverance-now-autonomously-pinpoints-its-location-on-mars/?utm_source=iContact&utm_medium=email&utm_campaign=1-nasajpl&utm_content=perseverance20260218



コメント