
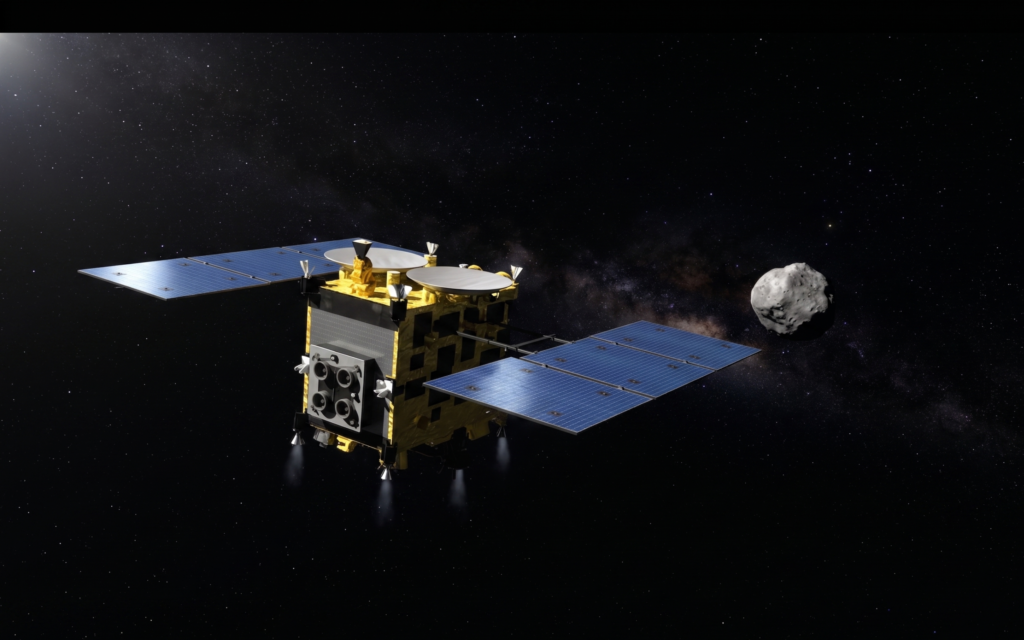
宇宙の謎に挑む実用機はやぶさ2
日本の小惑星探査機はやぶさ2は、小惑星探査機「はやぶさ」の後継機として宇宙航空研究開発機構によって打ち上げられました。
地球近傍小惑星であるリュウグウへの着陸およびサンプルリターンを目的として開発されたのです。
初号機が小惑星往復に初めて挑んだ実験機だったのに対し、本機は生命誕生の謎を解明するという科学的成果を上げるための実用機として位置づけられています。
基本設計は初代と同一ですが、初代の運用を通じて明らかになった問題点を解決すべく、大幅な改良が施されています。
満身創痍での運用となった初代の経験から、より確実にミッションを遂行するための知恵が詰め込まれているのです。
私たちの太陽系がどのようにして形成され、生命の源となる物質がどこから来たのかという根源的な問いに対し、直接的な証拠を持ち帰ることが期待されています。
地球の海の水や生命を構成する有機物が、小惑星から運ばれてきたという仮説を検証するための重要なステップとなります。
開発と製造は日本電気が担当し、日本の宇宙開発技術の粋を集めた探査機として完成しました。
トラブルを乗り越えた技術的進化
初代はやぶさが航行途中に多数のトラブルに見舞われたため、安定航行を目的として様々な変更がなされました。
例えば、パラボラアンテナに代わり、あかつきと同様の高利得平面アンテナを使用しています。
破損が発生した化学燃料スラスタ配管の再検討や、姿勢制御装置であるリアクションホイールの信頼性向上および予備の追加などが行われました。
メインの推進機関であるイオンエンジンは、推力を向上させた改良型を搭載しています。
これにより、長期間にわたる深宇宙探査においても、安定した航行能力を維持することが可能になりました。
また、試料を採取するための方法も大幅に改良されており、新しい機能として衝突装置が搭載されました。
この装置は、小惑星の表面だけでなく、内部の物質を採取するためにクレーターを作る役割を担っています。
探査機本体が小惑星の陰に隠れて安全を確保した後に起爆し、衝突体を目標天体に撃ち込むという高度な運用が行われます。
リュウグウへの長く過酷な道のり
はやぶさ2は2014年12月3日に、種子島宇宙センターからH-IIAロケット26号機によって宇宙へと打ち上げられました。
打ち上げ後はイオンエンジンや通信系などの初期チェックを順調に終え、巡航フェーズへと移行しました。
2015年12月には地球スイングバイを実施し、地球の重力を利用してリュウグウへ向かう軌道へと入ったのです。
広大な宇宙空間を一人旅する道のりは決して平坦ではなく、常に様々な困難が伴います。
しかし、地上からの精密な運用と探査機自身の自律的な制御によって、順調に航行を続けました。
2018年2月には、約130万キロメートルの距離からついに目標である小惑星リュウグウの姿をカメラに捉えることに成功しました。
そして2018年6月27日、打ち上げから約3年半の歳月を経て、ついにリュウグウの上空20キロメートルの位置に到着したのです。
この瞬間は、日本の宇宙探査における新たな金字塔が打ち立てられた歴史的な出来事でした。
世界初となる小惑星上での探査ロボット展開
リュウグウ到着後、はやぶさ2は様々な世界初の偉業を成し遂げていきます。
2018年9月、探査ローバーであるミネルバ-II1を地表に向けて投下し、見事に着地に成功しました。
投下された2台のローバーは、微小重力の環境下でジャンプして移動するという画期的な方法で小惑星の表面を探査しました。
着地後、ローバーは自身やリュウグウの地表の写真を上空の母船へと送信し、私たちに未知の世界の風景を届けてくれたのです。
小惑星上で探査機が着陸し、移動し、さらに写真撮影に成功したのは、これが世界で初めてのことでした。
続く10月には、ドイツとフランスが共同開発した小型着陸機マスコットも投下されました。
マスコットもリュウグウの地表に接触し、バウンドを経て無事に着地に成功し、17時間を超える観測活動を行いました。
複数の探査ロボットを小天体上に展開するという極めて高度なミッションを成功させたことは、技術力の高さを証明しています。
驚異的な精度を誇るタッチダウン
リュウグウの表面は、事前の予想以上に岩や石が散乱する険しい地形であることが判明しました。
そのため、当初予定されていた着陸計画は見直され、より慎重な運用が求められることになりました。
綿密なシミュレーションと準備を重ねた末、2019年2月22日に1回目のタッチダウンが実施されました。
ターゲットマーカーを目印にして降下し、極めて小さな誤差という驚異的な精度で着陸を成功させたのです。
着陸の瞬間、サンプラーホーンの先端から弾丸を発射し、舞い上がった砂や石を採取する仕組みも完璧に機能しました。
この一連の動作は、地球からの遠隔操作ではなく、探査機自身が自律的に判断して行われました。
極限の環境下で、ピンポイント着陸を成し遂げたことは、宇宙探査の歴史に残る大きな成果です。
この成功により、リュウグウの表面から非常に貴重なサンプルを採取できたと確信されました。
人工クレーター作成という前人未到の挑戦
表面の物質だけでなく、宇宙空間の風化を受けていない地下の新鮮な物質を採取することも重要な目的でした。
そのために、2019年4月に衝突装置をリュウグウに向けて分離し、人工クレーターを作成するというミッションに挑みました。
衝突装置が作動する際、飛び散る破片から身を守るために、はやぶさ2本体はリュウグウの反対側へと退避するという複雑な運用が行われました。
分離された小型カメラが、見事に衝突の瞬間と噴出物の様子を捉え、装置の正常な作動を確認したのです。
その後、人工クレーターの存在が確認され、予想以上に大きな直径約14メートルに達していることがわかりました。
そして2019年7月、人工クレーター周辺に飛び散った地下物質を採取するため、2回目のタッチダウンが敢行されました。
同一の天体に対して2地点への着陸を成功させたことも、世界初の快挙となります。
これにより、地球圏外の天体の地下物質にアクセスし、サンプルを採取するという前人未到の挑戦を見事に成し遂げました。

コメント